


Główną uwagę w artykule skierowano na właściwości detektora oraz na cechy systemu optycznego kamer termowizyjnych.
Kamery termowizyjne, mierząc natężenie promieniowania cieplnego (podczerwonego) emitowanego przez badany obiekt, pozwalają na bezdotykowy pomiar rozkładu temperatury na badanej powierzchni [1, 2]. Ciągły rozwój i doskonalenie tej technologii poszerza możliwości jej zastosowania, a to z kolei wpływa na specjalizację sprzętu. Obecnie są produkowane kamery specjalnie przeznaczone np. do budownictwa lub do diagnostyki szczelności instalacji gazowych, mające funkcje przydatne w wymienionych zastosowaniach. Są to albo pewne cechy wynikające z samej konstrukcji kamery, albo określone cechy i możliwości wynikające z oprogramowania zarządzającego pracą kamery.

1. Kamery termowizyjne użytkowane w Instytucie Techniki Cieplnej Politechniki Śląskiej, charakterystyka od lewej strony: (a) kamera z detektorem bolometrycznym FPA 320×240, zakres spektralny 7,5÷13 μm; (b) w środku detektor bolometryczny 640×480 i zakres spektralny 7,5÷13 μm; (c) po prawej kamera z detektorem fotonowym FPA o rozmiarze 640×512 i zakresem spektralnym 2,5÷5,1 μm
Rodzaj detektora podczerwieni
Detektory podczerwieni używane w kamerach mają postać matryc pojedynczych detektorów (pikseli) oznaczanych symbolem FPA (ang. Focal Plane Array). Przyjmując jako kryterium podziału zakres długości fali promieniowania, na które detektor jest wrażliwy, rozróżniamy zasadniczo detektory:
- krótkofalowe, ozn. SW (ang. Short Wave), działające w zakresie 2-5 μm;
- długofalowe, ozn. LW (ang. Long Wawe), działające w zakresie 7,5-14 μm.
Przyjmując natomiast za kryterium podziału sposób generacji sygnału pomiarowego, detektory dzieli się na termiczne i fotonowe.
Gdy za kryterium przyjmie się temperaturę pracy, detektory można podzielić na chłodzone i niechłodzone (pracują w temp. zbliżonej do temp. otoczenia).
W pomiarowych kamerach termowizyjnych stosuje się detektory termiczne, głównie bolometryczne oraz piroelektryczne, lub fotonowe – fotoprzewodzące, fotowoltaiczne.
Detektory bolometryczne. Są bardzo popularne ze względu na dobre własności pomiarowe i brak wymogu schładzania ich do niskiej temperatury w czasie pracy. Mają one jednak nieco niższą czułość w porównaniu z detektorami fotonowymi oraz ograniczoną szybkość rejestracji obrazów termicznych (do ok. 60 Hz), przy czym cecha ta ma znaczenie jedynie w specjalnych zastosowaniach – przy rejestracji szybkozmiennych pól temperatury. Detektory bolometryczne stosuje się w konstrukcji kamer długofalowych, tj. działających w zakresie 7,5-13(14) μm. Sygnałem pomiarowym w ich przypadku jest zmiana rezystancji cienkiej warstwy elementu pomiarowego, spowodowana zmianami temperatury tego elementu (na skutek pochłaniania promieniowania podczerwonego).
Detektory fotonowe. Budowane są z materiałów półprzewodnikowych (przykładowo InSb – antymonek indu lub MCT – telurek kadmowo-rtęciowy). Sygnałem pomiarowym jest dla nich zmiana przewodności elektrycznej, spowodowana przechodzeniem elektronów walencyjnych w atomach do poziomu przewodzenia (na skutek pochłonięcia fotonów energii promieniowania podczerwonego pochodzącego od badanego obiektu).
Aby ograniczyć liczbę elektronów swobodnych wyzwalanych termicznie w sposób naturalny (dających tzw. szum) i tym samym wyeksponować efekt wyzwalania elektronów wskutek pochłaniania promieniowania pochodzącego od badanej powierzchni, detektory te w czasie pracy schładza się do niskiej temperatury rzędu 77 K (-196°C), [3, 4]. Jest to pewna uciążliwość, ponieważ po włączeniu kamery urządzenie schładzające (mikroziębiarka) musi pracować przez jakiś czas, aby osiągnąć wymaganą temperaturę. Ponadto urządzenie schładzające ma ograniczoną trwałość.
Detektory fotonowe są wrażliwe na promieniowanie krótkofalowe i stosuje się je w konstrukcji kamer krótkofalowych. Ich zaletą jest wysoka czułość oraz możliwość osiągnięcia dużej szybkości odświeżania obrazu, co umożliwia rejestrację obrazów termicznych z bardzo dużą częstotliwością. W przypadku badania rozkładów temperatury na powierzchni ciał stałych nie ma różnicy jakościowej między wynikami pomiarów otrzymanymi za pomocą kamery długofalowej (LW) i krótkofalowej (SW). Różnice istnieją, jeśli chodzi o obszary ich zastosowań (patrz ramka).
|
Podejrzeć ogniwa fotowoltaiczne, kolektory słoneczne Szkło kwarcowe, w tym okienne, jest dobrze przepuszczalne dla promieniowania krótkofalowego, jednak przy długości fali promieniowania cieplnego wynoszącej ok. 4 μm następuje gwałtowny spadek przepuszczalności, a powyżej 5 μm szkło staje się nieprzezroczyste [1]. Zjawisko to (tzw. efekt szklarniowy) polega na tym, że szklane przegrody przepuszczają do wnętrza pomieszczeń krótkofalowe promieniowanie słoneczne, (maks. natężenie promieniowania słonecznego występuje dla fali o długości około 0,5 μm), natomiast skutecznie ograniczają emisję promieniowania długofalowego na zewnątrz. Tak więc w przypadku użycia kamery krótkofalowej jesteśmy w stanie zobaczyć źródło ciepła znajdujące się za przegrodą ze szkła kwarcowego, np. włókno włączonej żarówki. Dla promieniowania długofalowego szkło takie jest nieprzepuszczalne i patrząc kamerą LW na żarówkę, nie zobaczymy rozżarzonego włókna, a jedynie nagrzaną bańkę żarówki. Wykorzystując przezroczystość szkła dla promieniowania podczerwonego krótkofalowego, możemy za pomocą kamery SW zajrzeć przez szybę nawet do wnętrza ogniw czy kolektorów słonecznych.
Cechę wrażliwości detektorów na określone długości fali promieniowania podczerwonego, głównie krótkofalowego, wykorzystano w konstrukcji kamer służących do detekcji nieszczelności w instalacjach gazowych. Przykładowo, metan ma aktywne radiacyjnie pasma [2] w otoczeniu długości fali 2,37 μm, 3,31 μm oraz 7,65 μm. Użycie kamery SW (np. o zakresie spektralnym 2,5-5 μm) pozwoli na wizualne wykrycie obłoków metanu wydostającego się przez nieszczelności instalacji. |
Obok zakresu spektralnego i temperatury pracy, ważnym parametrem detektora jest tzw. czułość termiczna. Jest to wielkość podawana w stopniach skali temperatury i w uproszczeniu oznacza minimalną różnicę temperatury, jaką jest w stanie rozróżnić detektor w umownych warunkach (na ogół przy temp. 30°C).
Dla spotykanych modeli kamer wartość tego parametru zawiera się w granicach 0,15-0,03 K, przy czym im mniejsza wartość tego parametru, tym lepiej, ponieważ oznacza to wyższą czułość detektora. Najniższe wartości osiągają detektory fotonowe. W dobrej klasy kamerach diagnostycznych wartość czułości termicznej jest na poziomie 0,08 K. Należy jednak podkreślić, że nie jest to dokładność pomiarowa kamery, która jest gorsza od wyżej podanych wartości.
Rozdzielczość detektora
Rozdzielczość (albo rozmiar detektora) to kolejny ważny parametr związany z geometrią detektora. Oznacza on liczbę pikseli (pojedynczych detektorów), z których zbudowana jest matryca. Oczywiście, im większy jest rozmiar detektora, tym lepiej, ponieważ otrzymuje się obraz termalny badanego obiektu o wyższej jakości.
Najczęściej spotykane w kamerach rozmiary detektorów matrycowych FPA to: 60x60, 80x80, 120x120, 160x120, 240x180, 320x240, 640x480, 640x512, 1280x1024. Niestety, wraz ze wzrostem rozmiaru detektora gwałtownie rośnie jego cena, a zarazem cena kamery. Stąd nie jest uzasadnione kupowanie kosztownej kamery do specjalnych zastosowań, gdy nie jest to konieczne.
Kąt widzenia obiektywu
Następnym istotnym parametrem charakteryzującym kamerę jest kąt widzenia obiektywu oznaczany w opisach kamer jako HFOV (ang. Horizontal Field of View) – kąt widzenia w poziomie oraz VFOV (Vertical FOV) – kąt widzenia w pionie (rys. 2). W kamerach termowizyjnych nie stosuje się obiektywów o zmiennej ogniskowej.
Najprostsze modele kamer, przeznaczone do określonych zastosowań, są na ogół wyposażone w jeden niewymienny obiektyw. W nieco bardziej zaawansowanych modelach przeznaczonych do celów badawczych i diagnostycznych kąt widzenia kamery termowizyjnej można zmieniać skokowo przez zastosowanie dodatkowych wymiennych obiektywów. Obiektywy te zakłada się na wbudowany na stałe do kamery obiektyw podstawowy albo wymienia się je w całości. Producenci oferują zestawy obiektywów do poszczególnych modeli kamer.
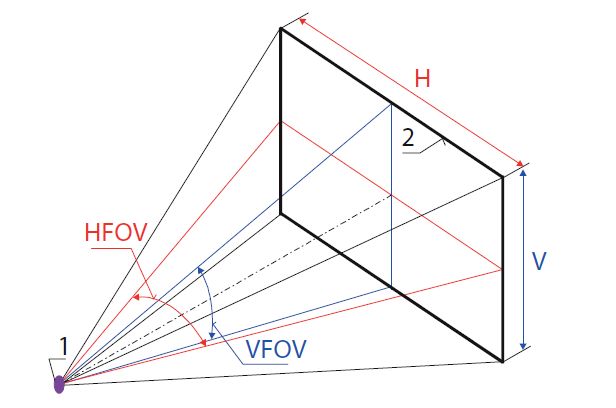
2. Definicja kątów HFOV i VFOF oraz wymiarów pola widzenia kamery; 1-obiektyw kamery, 2-obserwowany obszar
Kamery wyposażane są w obiektyw podstawowy zapewniający obserwację w obszarze ostrosłupa o podstawie prostokątnej i kątach wierzchołkowych 24°x18° (HFOV = 24°, VFOV = 18°) lub zbliżonych do podanych wartości. Dodatkowo oferuje się obiektywy wąskokątne o kątach np. 12° x 9°, 7° x 5,3° i szerokokątne 45° x 34° lub 80° x 60°.
Obiektywy o małych kątach widzenia używane są do diagnostyki trudno dostępnych, niedużych obiektów z większych odległości. Obiektywów szerokokątnych używa się, gdy chce się zwiększyć pole widzenia (np. zobaczyć badany obiekt w całości), a nie ma możliwości oddalenia się od obiektu. Doświadczenia autora wskazują, że taki obiektyw często jest przydatnym elementem wyposażenia.
Na rys. 3 przedstawiono zależność rozmiaru obserwowanego obszaru od kąta widzenia obiektywu i odległości od obiektu. Na podstawie wykresów (3a i 3b) można ocenić wymiary obserwowanego obszaru dla danego typu obiektywu lub dobrać właściwy obiektyw do planowanej inspekcji termowizyjnej. Jest to szczególnie ważne w przypadku obserwacji w pomieszczeniach lub na kładkach i podestach, gdy nie ma możliwości oddalenia się od obiektu celem powiększenia pola obserwacji.
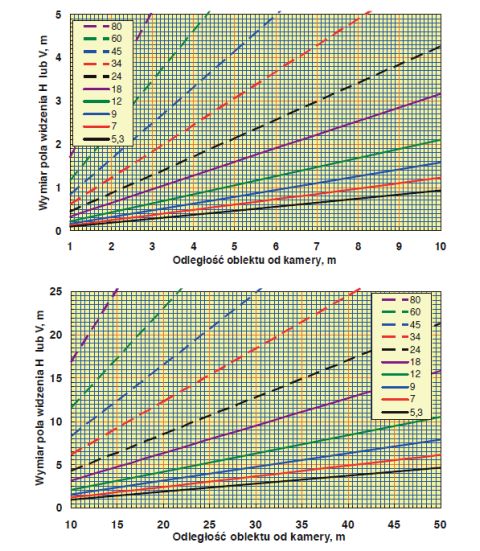
3. Wymiar pola obserwacji w zależności od kątów widzenia kamery HFOV lub VFOV i odległości od badanego obiektu (wartości kątów w stopniach podano w legendzie)
Rozdzielczość geometryczna kamery I FOV Kolejnym istotnym parametrem jest rozdzielczość geometryczna (kątowa) kamery oznaczana jako IFOV (ang. Instantaneous Field Of View). Jest to kąt, w obszarze którego wycinek badanej powierzchni wyemitował promieniowanie oświetlające pojedynczy piksel detektora kamery. Ze względu na kwadratowy kształt piksela, wymieniony wycinek badanej powierzchni jest również kwadratem o boku „c” i stanowi podstawę ostrosłupa o kącie wierzchołkowym równym IFOV (rys. 4).
Aby więc poprawnie zmierzyć temperaturę na powierzchni jakiegoś obiektu, powierzchnia ta musi być na tyle duża, aby wymieniony wycinek (będący podstawą ostrosłupa) w całości zmieścił się na niej. Otrzymana wartość temperatury zmierzona przez pojedynczy piksel detektora jest zawsze wartością uśrednioną w obszarze wycinka badanej powierzchni. Wielkość tego wycinka powierzchni jest więc najmniejszym obiektem, jaki może rozróżnić system optyczny kamery (rys. 4).
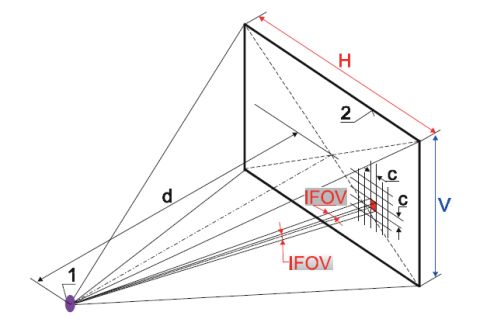
4. Ilustracja rozdzielczości kątowej (geometrycznej) kamery oraz elementarnego obszaru o wymiarze c x c obserwowanego przez pojedynczy detektor (piksel) matrycy FPA; 1-obiektyw kamery, 2-obserwowany obszar
Wartość parametru IFOV podawana jest w dokumentacji technicznej kamer najczęściej w miliradianach (mrad). Znając tę wartość, można łatwo obliczyć minimalną wielkość obiektu rozróżnialnego przez kamerę (wg wzoru):
![]()
gdzie: d – odległość między badanym obiektem i kamerą.
Wielkość „c” otrzymujemy w [mm], jeśli IFOV jest wyrażone w [mrad], a odległość „d” w [m]. Wartość IFOV można łatwo obliczyć, jeśli znamy rozmiar matrycy NH x NV i kąt widzenia obiektywu FOV:
![]()
gdzie: π = 3,14, NH – liczba pikseli w poziomej linii matrycy. Kąt HFOV jest wyrażony w [°], a obliczona war- tość IFOV będzie wyrażona w [mrad].
Powyższy wzór można także zastosować dla danych z kierunku pionowego, wprowadzając VFOV i NV (zamiast HFOV i NH). Przykładowo dla kamery o obiektywie HFOV x VFOV = 24° × 18° i matrycy detektora NH × NV = 320 × 240 otrzymamy:
IFOV = 1000 × 3,14 (24/180)/320 = 1,3 mrad.
Identyfikacja temperatury i kształtu obiektu
Podane wcześniej zależności pozwalają na obliczenie wymiaru „c” elementarnego obszaru rozróżnialnego przez kamerę. Na podstawie wartości IFOV oraz odległości badanego obiektu od kamery „d” może być wyznaczona minimalna wielkość obiektu, dla którego przez pojedynczy detektor (piksel) kamery zostanie zarejestrowana poprawna wartość temperatury. Często zdarza się bowiem, że ze względów bezpieczeństwa (wysokie napięcie) lub z braku odpowiednich warunków nie można dostatecznie blisko podejść do badanego obiektu i wówczas rzeczywista wartość wymiaru „c” będzie zbyt duża, aby zobaczyć kamerą interesujące nas elementy instalacji.
W technice instalacyjnej często poddaje się inspekcjom termowizyjnym różne rury i przewody elektryczne, a także elementy armatury instalacyjnej, śruby, złącza elektryczne itp. Pierwsze z wymienionych można zaliczyć do obiektów o charakterze liniowym, natomiast pozostałe – punktowych. Mając to na uwadze, w dalszej części artykułu przedstawiono uwarunkowania towarzyszące poprawnej identyfikacji temperatury i kształtu badanych elementów instalacji, rozpatrując obiekt liniowy i kołowy (rys. 5, 6).
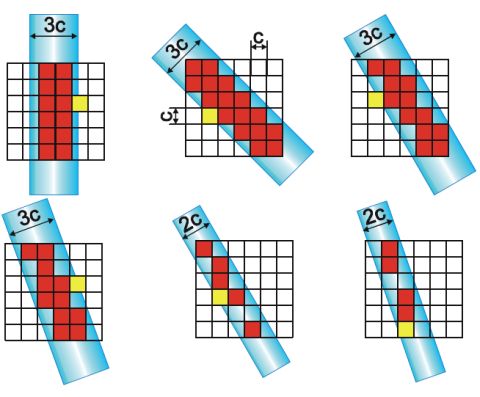
5. Konfiguracje pikseli matrycy detektora w całości opromieniowanych przez obiekt liniowy o grubości 3c oraz 2c
Na rys. 5. przedstawiono wizualnie kilka orientacji obiektu liniowego o wymiarze (grubości) 3c oraz 2c w stosunku do matrycy detektora. Jak wynika z tego rysunku, badany obiekt musi mieć grubość co najmniej 3c, aby uzyskać jego ciągły obraz na detektorze. W przypadku obiektu liniowego o wymiarze 2c nie ma gwarancji uzyskania ciągłego obrazu. Liczebność kwadratowych pikseli w obszarze liniowego obiektu mogłaby dokładnie wyznaczona przez odpowiedni opis matematyczny.
Z przyczyn praktycznych zastosowano uproszczoną analizę. Tylko piksele zaznaczone na czerwono wskażą poprawnie wartość temperatury badanego obiektu. Piksele brzegowe, których przykłady zaznaczono na żółto, zarejestrują temperaturę pośrednią między temperaturą badanego obiektu i temperaturą tła obiektu. Efekt ten występuje zawsze na brzegach badanych obiektów, niezależnie od ich wymiarów. Oczywiście, im więcej pikseli pokrywa powierzchnię badanego obiektu, tym lepszy jakościowo jest wynik badania.
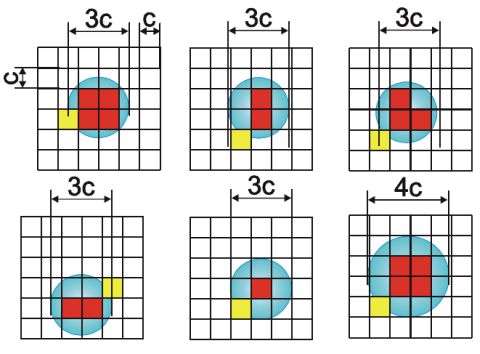
6. Rozkłady pikseli matrycy detektora w całości opromieniowanych przez obiekt kołowy o średnicy 3c oraz 4c
Podobną analizę przeprowadzono dla obiektu kołowego (rys. 6). Wynika z niej, że przy wymiarze (średnicy) obiektu równym 3c będzie on najczęściej reprezentowany przez 2 piksele, czasem przez 3. Cztery piksele znajdą się wewnątrz koła tylko w bardzo specyficznej sytuacji, podobnie jak 1 piksel – prawdopodobieństwo wystąpienia tych przypadków jest bardzo małe. Jeśli wymiar obiektu będzie wynosił 4c, wtedy zawsze w polu obiektu będą się znajdować co najmniej 4 piksele (ostatni przykład na rys. 6).
Uwagi końcowe
W artykule przedstawiono aspekty zastosowania kamer termowizyjnych w diagnostyce instalacji związane z rodzajem i parametrami detektora podczerwieni oraz z charakterystyką układu optycznego kamery. Wykorzystanie termowizji do detekcji nieszczelności instalacji gazowych wymaga zastosowania kamer z detektorem o zakresie spektralnym, który będzie obejmował obszar spektralny aktywności radiacyjnej gazu.
W przypadku diagnostyki obiektów liniowych (rury instalacyjne, przewody elektryczne itp.) należy przyjąć, że dopiero przy grubości obserwowanego obiektu wynoszącej co najmniej 3c będzie on odtworzony w postaci linii na termogramie z poprawną wartością temperatury w każdym przekroju tej linii.
Wymiar obiektów punktowych musi być równy 4c, aby otrzymać na termogramie w miarę wyraźny znacznik tego obiektu (składający się z co najmniej 4 pikseli). Oczywiście, jeśli badany obiekt będzie większy, to otrzymamy dokładniejsze odwzorowanie termalne jego kształtu.
Tadeusz Kruczek
Instytut Techniki Cieplnej
Politechnika Śląska
Literatura
[1] Kostowski E.: Promieniowanie cieplne, PWN, Warszawa, 1993
[2] Kruczek T.: Kamery termowizyjne – zasada działania i zastosowania w diagnostyce instalacji. Polski Instalator, nr 4, 2013, s. 30-32
[3] Praca zbiorowa (red. Madura H.): Pomiary termowizyjne w praktyce. Agenda Wydawnicza PAK, Warszawa, 2004
[4] Rogalski A.: New trends in infrared detector technologies Mat. IX Konferencji Termografia i Termometria w Podczerwieni TTP2011, Ustroń, 2011, s. 27-43
Całość artykułu w wydaniu drukowanym i >elektronicznym
Inne artykuły o podobnej tematyce patrz Serwisy Tematyczne
Więcej informacj: Świat Szkła 03/2014